Finite element model of a helical swimming robot in COMSOL
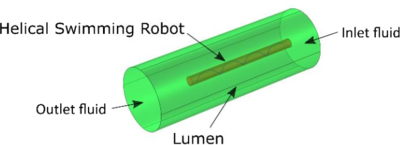
This work presents a small swimmer model in a low Reynolds number ($Re$) environment governed by the equation of motion for Stokes flow in COMSOL Multiphysics®. The entity, a few centimetres helical robot, is located inside of a pipe full of silicone oil, where the forces caused by the robot's rotation rate $\Omega$ and the axial velocity $U$ are studied. By means of the COMSOL Multiphysics® CFD Module, it is possible to implement a creeping flow in which inertial terms are neglected (Stokes Flow). Within this framework, the work is divided into two independent studies: an axial input flow and a rotation motion rate study. Results are compared with the Resistive Force Theory (RFT) based on the premise that, in low $Re$ environments, force and torque contributions caused by the robot's axial velocity $U$ and rotation rate $\Omega$ are additive. The input flow emulates the longitudinal motion of the robot in order to obtain the drag forces caused by fluid resistance. The motion rate study uses the moving mesh to emulate the spinning of the helix. To lighten the computational cost of the model, a frozen rotor approximation is implemented to estimate the forces and torque generated by rotation. By means of this model, it is possible to study the impact of robot's geometry parameters on swimming performance, like the pitch $\lambda$, the length $L$ and the exponential envelope $1-e^{-\alpha s^2}$. Therefore, different propeller geometry combinations have been studied in this work. From efficiency criteria, an optimal value is obtained when $\lambda=7R$, where R is the radius of the helix. Likewise, the linear dependence of force and torque regarding the length of the helix is verified. Finally, results reveal that the COMSOL Multiphysics® model is more appropriate than RFT in a hypothetical design process, since it can estimate the robot performance, even for complex geometries, in a standalone simulation.
Download
- POSTER FINAL.pdf - 0.28MB
- PAPER FINAL.pdf - 0.54MB